Rick Rather has performed a valuable service for Harpoon gamers by developing an Excel spreadsheet that will help a referee calculate sonar performance between two units using the sonar range modifiers listed on page 4-11 of the Harpoon 4 rule book, and also the convergence zone and cavitation tables on page 4-12.
This worksheet varies from the standard Harpoon rules in a few areas concerning the “Layer. ” Section 4.4.4.1 describes the Layer as an abrupt change in water temperature, which causes sound to reflect at certain angles.
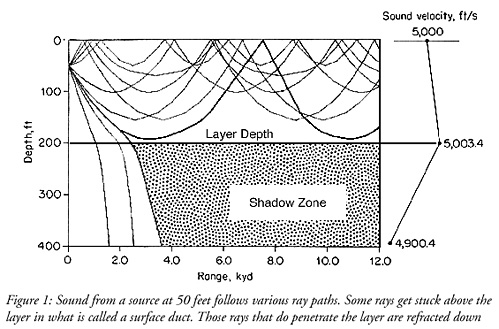
Although this is technically correct, the dominant effect on sound propagation in water comes from refraction rather than reflection. Sound between the surface and the Layer is basically channeled, whereas sound in the rapidly cooling water below the layer bends sharply downwards, forming a “shadow zone" in which the sub can hide (see Figure 1).
In game terms this difference doesn't really matter except when the Layer is at zero depth or there is no Layer. Under the normal rules these two conditions would be treated the same; with no cross-layer modifier for a submarine at any depth. Instead, “No Layer" means that the water is basically the same temperature from the surface to very deep depths. This makes it more difficult for a submarine to hide. Although “No Layer" allows good direct path ranges against targets at any depth, the negative sound gradient that characterizes the Layer is also what causes long-range sound rays to converge, giving the “Convergence Zone" its name.
Thus, when there is no Layer, there is no cross-layer penalty, but there is also no Convergence Zone detection. Whereas a No Layer situation is very good for surface ships, a Zero Layer Depth situation is very bad. This means that a strong negative gradient does exist, and it starts right at the surface. With the sound waves being refracted downward, all target generated sound and active pings head for the bottom instead of propagating outwards. Thus, when Layer depth is 0m, a surface unit vs. a submerged sub will always use the cross-layer modifier for its hull-mounted sonar (but its towed array and/or VDS will function normally).
For setting up a scenario, No Layer conditions can be found in arctic and shallow seas, and in the deep ocean in winter and early spring. Zero Layer Depth can occur in the springtime, as warming air starts to heat the water at the surface. “Standard" layer conditions are typical in the late springtime, summer and fall, and in most tropical waters.
Features
To use the Sonar calculator, all you need to do is enter the name, speed and sonar data from Annex M for two units. You can assign depth using drop-down menus to select the correct Harpoon 4 depth band for each side. Chose your environment by entering a sea state and checking boxes to indicate water depth (shallow or very deep), whether a layer is present (and if so, is it at zero-depth), and even change the standard cross-layer modifier.
Optional Rule:Because of the way the sound paths bend below the Layer, there is a “best depth" for a submarine to evade a surface sonar. Going back to figure 1, a submarine approaching a surface ship has a greater risk of being detected sooner if it is at 400 feet instead of 250 feet. If you check the ‘Using Best Depth Rule' box, , above-layer sonars searching for a submarine below the Layer use an additional .6 modifier if the sub is at “Intermediate I" depth (and above, if ‘Zero Layer Depth' is selected)), on top of the standard cross-layer mod used at other depths.
You can also designate special environmental factors such as whether the scenario takes place in the Mediterranean Sea (which affects CZ detection)and indicate a nuclear “blueout", which drastically hampers detection. You can check target-related conditions, such as an anechoic coating or if a boat is rigged for ultra quiet. Lastly, you can even enter an overall modifier for all sonar detection ranges.
The calculator will not allow you to pick incompatible selections (for example, a boat rigged for ‘ultra-quiet' will not be snorkeling, , and an ‘ice-picked' submarine will not be accelerating at 50%). ‘Ultra-Quiet' will not be a selectable option above 3 kts. ‘Bottomed/Ice-Picked' will not appear as an option unless the target speed is 0 kts. Barring another Ice Age, the Med stays ice-free year-round, so ‘Pack Ice' and ‘Marginal Ice Zones' are not compatible selections with the Med.
Active Sonar and Transients:Active sonar pings and transient sounds (such as weapons fire, explosions, hull implosions, etc. )are not affected by the usual propulsion-related sounds and flow noise. A missile launch from a Very Quiet sub is just as loud as a launch from a noisy boat, and a sonar ping from a ship at 18 knots is the same as one at 5 knots. Hence, the range to detect active sonar and transients is calculated separately on the Sonar Comparison worksheet. You may enter the noise rating for transients. The default rating for active sonar is “Loud".
Some referees may feel that the given noise levels are not realistic to a situation. For example, I feel that active sonars are louder than “Loud". For this reason, I ’ve included a box for referees to enter their own modifier for detecting active sonar and transients. I recommend a multiplier of 2 versus MF active sonars, and 3 versus LF systems.
The worksheet will automatically calculate cross-layer and cavitating conditions, based on layer settings, target depth and speed. All sonar detection ranges on this worksheet are the final calculated ranges to be used in the detection phase. Note that ranges may need to be recalculated each turn, depending on circumstances.
If you have more than two units in a scenario, save separate files for different combinations to avoid having to reenter data. For example, If you have a ship w/helo against a submarine, you might save “KnoxvsV3.xls" and “buoysvsV3.xls"
Rick’s spreadsheet is available for download at the Clash of Arms website. His modifications to the sonar rules are not of ficial changes, but Rick ’s interpretation of how sonar works. If you have questions or suggestions about Rick ’s calculator, you can contact him through Clash of Arms at clashofarm@aol. com
Figure 1:Sound from a source at 50 feet follows various ray paths. Some rays get stuck above the layer in what is called a surface duct. Those rays that do penetrate the layer are refracted down.
BT
Back to The Naval Sitrep # 27 Table of Contents
Back to Naval Sitrep List of Issues
Back to MagWeb Master Magazine List
& copy Copyright 2004 by Larry Bond and Clash of Arms.
This article appears in MagWeb.com (Magazine Web) on the Internet World Wide Web.
Other military history and related articles are available at http://www.magweb.com